Daha önceki notlarda bahsettiğimiz gibi gerçek zamanlı gömülü sistemler oluşabilecek olaylara(events) karşı bir cevap vermek zorundadır. Önceki notlarda tasklar arasında oluşan olaylara cevap vermek için aşağıdaki özelliklere sahip olan semaphore ve queue yapısını görmüştük.
- Tek bir olayın oluşması için taskın blocked state’de beklemesine izin verir.
- Olay gerçekleştiğinde tek bir taskın bloğunu kaldırırlar. Bu task event’ı bekleyen en yüksek öncelikli tasktır.
Event Grupları ise olayların tasklar ile haberleşebilmesine izin veren başka bir FreeRTOS özelliğidir. Semaphore ve kuyruğun aksine;
- Event Groups bir veya birden fazla olayın birleşimi için task’ı blocked state’de tutar.
- Event Groups bir olayın veya birden fazla olayın birleşiminin gerçekleşmesini bekleyen bütün taskların bloğunu kaldırır.
Event gruplarının bu benzersiz özellikleri tasklar arasındaki senkronizasyon, olayları birden fazla task’a yayınlama, bir taskın birden fazla olayın gerçekleşmesini beklemek için blocked state’de tutulması ve bu olaylara karşı alınabilecek aksiyonların bitmesini beklemek için taskları blocked state’de tutmak event grupları daha kullanışlı yapar.
Event grupları aynı zamanda uygulama tarafından harcanan RAM miktarını da azaltır(birden fazla binary semaphore yerine events group kullanarak).
Event Groups, Event Flags ve Event Bits
Event flag(bayrak) bir olayın gerçekleşip gerçekleşmediğini gösteren bir boolean(1 veya 0) sayıdır. Event grup ise bu flaglerin oluşturduğu bir set, bir dizidir.
Bir event flag sadece 1 veya 0 olabilir. Bu yüzden bir bayrağın durumu tek bir bit ile tutulabilir. Tüm bayrakların tutulduğu event group ise bir değişken içerisinde tutulabilir. Bu değişken FreeRTOS’da EventBits_t tipinde tanımlanır. Eğer EventBits_t değişkeninin herhangi bir biti 1 olarak set edilirse bu bite bağlı bir olay gerçekleşmiş demektir. EventBits_t değişkeninin içerisindeki event flagleri aşağıdaki gibidir.

Eğer event grubun değeri 0x92 (binary 1001 0010) ise sadece 1.,4. ve 7. bit set edilmiş ve dolayısı ile bu bitlere bağlı olaylar oluşmuş demektir. Event gruop değeri 0x92 iken event flagleri aşağıdaki gibi olur.

Buradaki bitlerin anlamını belirlemek yazılımcıya aittir. Örnegin;
- Bit 0’ı networkten mesaj geldi anlamında tanımlayabilir.
- Bit 1’i network üzerinden mesaj gönderilmeye hazır anlamında tanımlayabilir.
- Bit 2’yi ise network bağlantısını kesmek anlamında kullanabilir.
Event grubun kaç bit olacağı configUSE_16_BIT_TICKS makrosuna göre belirlenir. Bu makro 1 olarak tanımlanırsa 8 bitlik, 0 olarak tanımlanırsa 24 bitlik bir event grup oluşturulur.
Event gruplar da bir RTOS nesnesi olduğu için herhangi bir task ve interrupt içinden erişilebilir. Birden fazla task aynı event grubun bitlerini set edebilir ve birden fazla task aynı event grubun bitlerini okuyabilir.
xEventGroupCreate() Fonksiyonu
FreeRTOS da event group oluşturabilmek için xEventGroupCreate() fonksiyonu kullanılır.
1 | EventGroupHandle_t xEventGroupCreate( void ); |
Görüldüğü gibi bu fonksiyon bir parametre almaz. Eğer event grup oluşturulamadı ise NULL, oluşturuldu ise EventGroupHandle_t tipinde bir handle döndürür.
xEventGroupSetBits() Fonksiyonu
Bu fonksiyon bir veya birden fazla event biti set etmek için kullanılır. Bu bit veya bitler set edildiğinde bu bitlere bağlı olayların gerçeklestiğini tasklara bildirmek için kullanılır.
1 2 | EventBits_t xEventGroupSetBits( EventGroupHandle_t xEventGroup, const EventBits_t uxBitsToSet ); |
- xEventGroup: xEventGroupCreate() fonksiyonun döndürdüğü handle.
- uxBitsToSet: Set edilecek bit veya bitlerin girildiği parametredir. Girilen parametre içeride bitwise OR işlemine tutulur. Yani sadece 1 olarak set edilen bitler değiştirilir. Zaten hali hazırda set edilmiş bitlere dokunulmaz. Örnegin; bu parametre 0x04 (0100) olarak girilirse üçüncü bit set edilir.
- Return Değeri: fonksiyon tarafından değiştirilmeden önceki event değişkeninin değerini döndürür.
Bu fonksiyonun interrupt-safe versiyonu olan xEventGroupSetBitsFromISR() fonksiyonu da bulunmaktadır.
xEventGroupWaitBits() Fonksiyonu
Bu fonksiyon event gruptan bit okumaya ve event bitler set edilene kadar taskları blocked state’de tutmaya yarar.
1 2 3 4 5 | EventBits_t xEventGroupWaitBits( const EventGroupHandle_t xEventGroup, const EventBits_t uxBitsToWaitFor, const BaseType_t xClearOnExit, const BaseType_t xWaitForAllBits, TickType_t xTicksToWait ); |
- xEventGroup: xEventGroupCreate() fonskyionunun döndürdüğü event handle
- uxBitsToWaitFor: Set edilmesi beklenen event bitleri girmek için kullanılan parametredir. Örneğin bu fonskiyonu çağıran task bit 0 ve bit 2 nin set edilmesini bekliyor ise bu parametre 0x05 (0101) olarak girilmelidir.
- xClearOnExit: Eğer bu parametre pdTRUE olarak girilirse bu fonksiyondan çıkılmadan uxBitsToWaitFor parametresine girilen bitler temizlenir.
- xWaitForAllBits: Bu bit pdFALSE olarak girilirse set edilmesi beklenen bitlerden herhangi biri set edildiğinde bu fonksiyonun çağırıldığı task blocked state den çıkar. Eğer pdTRUE ise set edilmesi beklenen bütün bitler set edilmeden task blocked stateden çıkmaz.
- xTicksToWait: Taskın blocked state’de ne kadar bekletileceğinin girildiği parametredir.
- Return Değeri: Event grubun değerini döndürür. Eğer block süresi aşılırsa yine event grubun block süresi dolduğundaki değeri döndürülür.
Bu fonksiyonun nasıl çalıştığını daha iyi anlamak için aşağıdaki tabloyu inceleyebiliriz.

FreeRTOS da EventGroups ile ilgili diğer fonksiyonları incelemek için buraya tıklayabilirsiniz.
FreeRTOS da Event Groups Kullanımına Örnek
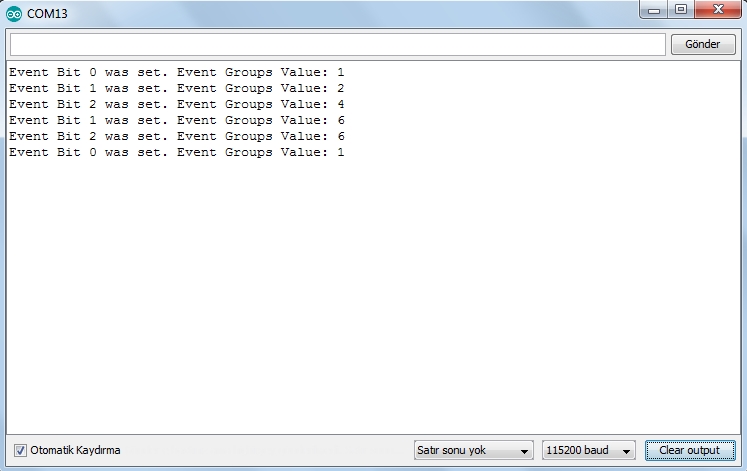
Amaç: İki adet task tanımla. Tasklardan biri 3 bit event beklesin. Diğer task ise bir saniye aralıklar ile event üretsin. Event gruplarının nasıl çalıştığını görmek ve anlık olarak hangi event’ın gerçekleştiğini görmek için UART üzerinden stringler seriport ekranına gönderilsin.
Event bekleyen taskı basitçe aşağıdaki gibi oluşturabiliriz.
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 | void EventProcessTask(void * argument) { EventBits_t EventGroupValue; char string[50]; for(;;) { EventGroupValue = xEventGroupWaitBits(EventGroupHandle, 0x07, // ....0111 -> wait for first three bits pdTRUE, // clear on exit pdFALSE, // Wait for all bits portMAX_DELAY); if((EventGroupValue & 0x01) != 0) // if bit 0 was set { sprintf(string,"Event Bit 0 was set. Event Groups Value: %d\n",EventGroupValue); Uart_Print(string); } if((EventGroupValue & 0x02) != 0) // if bit 1 was set { sprintf(string,"Event Bit 1 was set. Event Groups Value: %d\n",EventGroupValue); Uart_Print(string); } if((EventGroupValue & 0x04) != 0) // if bit 2 was set { sprintf(string,"Event Bit 2 was set. Event Groups Value: %d\n",EventGroupValue); Uart_Print(string); } } } |
Yukarıdaki gibi bir task fonksiyonunu yazmadan önce main üzerinde aşağıdaki gibi bir event group handle’ı oluşturmamız gerekir.
1 | EventGroupHandle_t EventgGroupHandle; |
Bu handle’ı daha sonra event oluştururken kullanacağız.
1 | EventgGroupHandle = xEventGroupCreate(); |
Yukarıdaki EventProcessTask() fonksiyonunda set edilmesi beklenen bitler 0. bit ,1. bit ve 2. bittir. Bu yüzden xEventGroupWaitBits() fonksiyonuna uxBitsToWaitFor parametresi olarak 00000111 binary sayısının hex karşılığı olan 0x07 yazılmıştır. xWaitForAllBits parametresi pdFALSE olarak girildiği için bu bitlerin hepsinin set edilmesini beklemeden tek bir bit set edildiğinde task blocked state den çıkacaktır. Daha sonra EventGroupValue değerinin hangi bitlerinin set edildiği if blokları ile kontrol edilip buna göre bir string UART üzerinden gönderilmiştir.
Event üreten task fonksiyonu ise aşağıdaki gibidir.
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 | void EventGeneratorTask(void * argument) { int state=0; for(;;) { switch(state) { case 0: xEventGroupSetBits(EventGroupHandle,0x01); // event group value 001 state++; break; case 1: xEventGroupSetBits(EventGroupHandle,0x02); // event group value 010 state++; break; case 2: xEventGroupSetBits(EventGroupHandle,0x04); // event group value 100 state++; break; case 3: xEventGroupSetBits(EventGroupHandle,0x06); // event group value 110 state++; break; case 4: state=0; break; } vTaskDelay(pdMS_TO_TICKS(1000)); } } |
Burada bir switch-case yapısı ile birer saniye aralıklarla even bitleri set edilerek event’lar üretilemiştir. Bu task içerisinde her xEventGroupSetBits() fonksiyonu çağrıldığında diğer task çalışmaya başlayacaktır.
Tüm Kodlar (FreeRTOS ile)
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 136 137 138 139 140 141 142 143 144 145 146 147 148 149 150 151 152 153 154 155 156 157 158 159 160 161 162 163 164 165 166 167 168 169 170 171 172 173 174 175 176 177 178 179 180 181 182 183 184 185 186 187 188 189 190 191 192 193 194 195 196 197 198 199 200 201 202 203 204 205 206 207 208 209 210 211 212 213 214 215 216 217 218 219 220 221 222 223 224 225 226 227 228 229 230 231 232 233 234 235 236 237 238 239 240 241 242 243 244 245 246 247 248 249 250 251 252 253 254 255 256 257 258 259 260 261 262 263 264 265 266 267 268 269 270 271 272 273 274 275 276 277 278 279 280 281 282 283 284 285 286 287 288 289 290 291 292 293 294 295 296 297 298 299 300 301 302 303 304 305 306 307 308 309 310 311 312 313 314 315 316 317 318 319 320 321 322 323 324 325 326 327 328 329 330 331 332 333 334 335 336 337 338 339 340 341 342 343 344 345 346 347 348 349 350 351 352 353 354 355 356 357 358 359 360 361 362 363 364 365 366 367 368 369 370 371 372 373 374 375 376 377 378 379 380 381 382 383 384 385 386 387 388 389 390 391 392 393 394 395 396 397 398 399 400 401 402 403 404 405 | /** ****************************************************************************** * @file : main.c * @brief : Main program body ****************************************************************************** * This notice applies to any and all portions of this file * that are not between comment pairs USER CODE BEGIN and * USER CODE END. Other portions of this file, whether * inserted by the user or by software development tools * are owned by their respective copyright owners. * * Copyright (c) 2020 STMicroelectronics International N.V. * All rights reserved. * * Redistribution and use in source and binary forms, with or without * modification, are permitted, provided that the following conditions are met: * * 1. Redistribution of source code must retain the above copyright notice, * this list of conditions and the following disclaimer. * 2. Redistributions in binary form must reproduce the above copyright notice, * this list of conditions and the following disclaimer in the documentation * and/or other materials provided with the distribution. * 3. Neither the name of STMicroelectronics nor the names of other * contributors to this software may be used to endorse or promote products * derived from this software without specific written permission. * 4. This software, including modifications and/or derivative works of this * software, must execute solely and exclusively on microcontroller or * microprocessor devices manufactured by or for STMicroelectronics. * 5. Redistribution and use of this software other than as permitted under * this license is void and will automatically terminate your rights under * this license. * * THIS SOFTWARE IS PROVIDED BY STMICROELECTRONICS AND CONTRIBUTORS "AS IS" * AND ANY EXPRESS, IMPLIED OR STATUTORY WARRANTIES, INCLUDING, BUT NOT * LIMITED TO, THE IMPLIED WARRANTIES OF MERCHANTABILITY, FITNESS FOR A * PARTICULAR PURPOSE AND NON-INFRINGEMENT OF THIRD PARTY INTELLECTUAL PROPERTY * RIGHTS ARE DISCLAIMED TO THE FULLEST EXTENT PERMITTED BY LAW. IN NO EVENT * SHALL STMICROELECTRONICS OR CONTRIBUTORS BE LIABLE FOR ANY DIRECT, INDIRECT, * INCIDENTAL, SPECIAL, EXEMPLARY, OR CONSEQUENTIAL DAMAGES (INCLUDING, BUT NOT * LIMITED TO, PROCUREMENT OF SUBSTITUTE GOODS OR SERVICES; LOSS OF USE, DATA, * OR PROFITS; OR BUSINESS INTERRUPTION) HOWEVER CAUSED AND ON ANY THEORY OF * LIABILITY, WHETHER IN CONTRACT, STRICT LIABILITY, OR TORT (INCLUDING * NEGLIGENCE OR OTHERWISE) ARISING IN ANY WAY OUT OF THE USE OF THIS SOFTWARE, * EVEN IF ADVISED OF THE POSSIBILITY OF SUCH DAMAGE. * ****************************************************************************** */ /* Includes ------------------------------------------------------------------*/ #include "main.h" #include "stm32f1xx_hal.h" /* USER CODE BEGIN Includes */ #include "FreeRTOS.h" #include "task.h" #include "event_groups.h" #include "string.h" #define Uart_Print(__message) HAL_UART_Transmit(&huart1,(uint8_t *)__message,strlen(__message),HAL_MAX_DELAY) /* USER CODE END Includes */ /* Private variables ---------------------------------------------------------*/ UART_HandleTypeDef huart1; /* USER CODE BEGIN PV */ /* Private variables ---------------------------------------------------------*/ EventGroupHandle_t EventGroupHandle; /* USER CODE END PV */ /* Private function prototypes -----------------------------------------------*/ void SystemClock_Config(void); static void MX_GPIO_Init(void); static void MX_USART1_UART_Init(void); /* USER CODE BEGIN PFP */ /* Private function prototypes -----------------------------------------------*/ void EventGeneratorTask(void * argument); void EventProcessTask(void * argument); /* USER CODE END PFP */ /* USER CODE BEGIN 0 */ /* USER CODE END 0 */ /** * @brief The application entry point. * * @retval None */ int main(void) { /* USER CODE BEGIN 1 */ /* USER CODE END 1 */ /* MCU Configuration----------------------------------------------------------*/ /* Reset of all peripherals, Initializes the Flash interface and the Systick. */ HAL_Init(); /* USER CODE BEGIN Init */ /* USER CODE END Init */ /* Configure the system clock */ SystemClock_Config(); /* USER CODE BEGIN SysInit */ /* USER CODE END SysInit */ /* Initialize all configured peripherals */ MX_GPIO_Init(); MX_USART1_UART_Init(); /* USER CODE BEGIN 2 */ EventGroupHandle = xEventGroupCreate(); xTaskCreate(EventGeneratorTask,"Task 1",configMINIMAL_STACK_SIZE,NULL,0,NULL); xTaskCreate(EventProcessTask,"Task 2",configMINIMAL_STACK_SIZE,NULL,0,NULL); vTaskStartScheduler(); /* USER CODE END 2 */ /* Infinite loop */ /* USER CODE BEGIN WHILE */ while (1) { /* USER CODE END WHILE */ /* USER CODE BEGIN 3 */ } /* USER CODE END 3 */ } /** * @brief System Clock Configuration * @retval None */ void SystemClock_Config(void) { RCC_OscInitTypeDef RCC_OscInitStruct; RCC_ClkInitTypeDef RCC_ClkInitStruct; /**Initializes the CPU, AHB and APB busses clocks */ RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSE; RCC_OscInitStruct.HSEState = RCC_HSE_ON; RCC_OscInitStruct.HSEPredivValue = RCC_HSE_PREDIV_DIV1; RCC_OscInitStruct.HSIState = RCC_HSI_ON; RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON; RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSE; RCC_OscInitStruct.PLL.PLLMUL = RCC_PLL_MUL9; if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK) { _Error_Handler(__FILE__, __LINE__); } /**Initializes the CPU, AHB and APB busses clocks */ RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK |RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2; RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK; RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1; RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV2; RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV1; if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_2) != HAL_OK) { _Error_Handler(__FILE__, __LINE__); } /**Configure the Systick interrupt time */ HAL_SYSTICK_Config(HAL_RCC_GetHCLKFreq()/1000); /**Configure the Systick */ HAL_SYSTICK_CLKSourceConfig(SYSTICK_CLKSOURCE_HCLK); /* SysTick_IRQn interrupt configuration */ HAL_NVIC_SetPriority(SysTick_IRQn, 15, 0); } /* USART1 init function */ static void MX_USART1_UART_Init(void) { huart1.Instance = USART1; huart1.Init.BaudRate = 115200; huart1.Init.WordLength = UART_WORDLENGTH_8B; huart1.Init.StopBits = UART_STOPBITS_1; huart1.Init.Parity = UART_PARITY_NONE; huart1.Init.Mode = UART_MODE_TX_RX; huart1.Init.HwFlowCtl = UART_HWCONTROL_NONE; huart1.Init.OverSampling = UART_OVERSAMPLING_16; if (HAL_UART_Init(&huart1) != HAL_OK) { _Error_Handler(__FILE__, __LINE__); } } /** Configure pins as * Analog * Input * Output * EVENT_OUT * EXTI */ static void MX_GPIO_Init(void) { /* GPIO Ports Clock Enable */ __HAL_RCC_GPIOD_CLK_ENABLE(); __HAL_RCC_GPIOA_CLK_ENABLE(); } /* USER CODE BEGIN 4 */ /* USER CODE END 4 */ void EventGeneratorTask(void * argument) { int state=0; for(;;) { switch(state) { case 0: xEventGroupSetBits(EventGroupHandle,0x01); // event group value 001 state++; break; case 1: xEventGroupSetBits(EventGroupHandle,0x02); // event group value 010 state++; break; case 2: xEventGroupSetBits(EventGroupHandle,0x04); // event group value 100 state++; break; case 3: xEventGroupSetBits(EventGroupHandle,0x06); // event group value 110 state++; break; case 4: state=0; break; } vTaskDelay(pdMS_TO_TICKS(1000)); } } void EventProcessTask(void * argument) { EventBits_t EventGroupValue; char string[50]; for(;;) { EventGroupValue = xEventGroupWaitBits(EventGroupHandle, 0x07, // ....0111 -> wait for first three bits pdTRUE, // clear on exit pdFALSE, // Wait for all bits portMAX_DELAY); if((EventGroupValue & 0x01) != 0) // if bit 0 was set { sprintf(string,"Event Bit 0 was set. Event Groups Value: %d\n",EventGroupValue); Uart_Print(string); } if((EventGroupValue & 0x02) != 0) // if bit 1 was set { sprintf(string,"Event Bit 1 was set. Event Groups Value: %d\n",EventGroupValue); Uart_Print(string); } if((EventGroupValue & 0x04) != 0) // if bit 2 was set { sprintf(string,"Event Bit 2 was set. Event Groups Value: %d\n",EventGroupValue); Uart_Print(string); } } } /** * @brief Period elapsed callback in non blocking mode * @note This function is called when TIM1 interrupt took place, inside * HAL_TIM_IRQHandler(). It makes a direct call to HAL_IncTick() to increment * a global variable "uwTick" used as application time base. * @param htim : TIM handle * @retval None */ void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim) { /* USER CODE BEGIN Callback 0 */ /* USER CODE END Callback 0 */ if (htim->Instance == TIM1) { HAL_IncTick(); } /* USER CODE BEGIN Callback 1 */ /* USER CODE END Callback 1 */ } /** * @brief This function is executed in case of error occurrence. * @param file: The file name as string. * @param line: The line in file as a number. * @retval None */ void _Error_Handler(char *file, int line) { /* USER CODE BEGIN Error_Handler_Debug */ /* User can add his own implementation to report the HAL error return state */ while(1) { } /* USER CODE END Error_Handler_Debug */ } #ifdef USE_FULL_ASSERT /** * @brief Reports the name of the source file and the source line number * where the assert_param error has occurred. * @param file: pointer to the source file name * @param line: assert_param error line source number * @retval None */ void assert_failed(uint8_t* file, uint32_t line) { /* USER CODE BEGIN 6 */ /* User can add his own implementation to report the file name and line number, tex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) */ /* USER CODE END 6 */ } #endif /* USE_FULL_ASSERT */ /** * @} */ /** * @} */ /************************ (C) COPYRIGHT STMicroelectronics *****END OF FILE****/ |
CMSIS-RTOS ile EventGroups
Bu yazıya kadar hep CMSIS-RTOS ‘un 1. versiyonunu kullanmıştık. Versiyon 1 de ise event groups ile ilgili API fonksiyonları bulunmamaktadır.Bunun yerine Signal events isimli bir başlık altında tasklar arasında event groups benzeri bir API fonksiyonları vardır fakat bu fonksiyolar da arka planda task bildirim(task notification) API fonksiyonlarını kullanır. O konuya bir sonraki notta değineceğiz. Bu yüzden bu notu burada sonlandırıyorum bir sonraki notta görüşmek üzere.
Kaynaklar
- Mastering the FreeRTOS™ Real Time Kernel-A Hands-On Tutorial Guide , Richard Barry
- freertos.org
- https://www.keil.com/pack/doc/CMSIS/RTOS/html/index.html
Hocam teşekkür ederim, bana çok yardımcı oldunuz.
Rica ederim.
Gömülü sistemler üzerine bu konu hakkında herhangi bir bilgiyi yabancı kaynaklardan bile edinmek çok zorken muhteşem bir içerik hazırlamışınız hocam. Elinize zihninize sağlık. Allah ilmimizi arttırsın.
(Geçmiş yıllarda sürekli sağa sola sallayıp şevk kıran kayserili kaçak embedıdçıya selamlar. İçerik dediğin böyle olur bak. (O kendini biliyor :D))
Teşekkürler:) Amin inşallah.