Bu yazıda DRV8825 sürücüsünü kullanarak Bipolar step motorun STM32f103 mikrodenetleyicisi ile nasıl kontrol edileceğine değineceğim.
Öncelikle step motorlardan biraz bahsedelim. Step motorlar diğer DC motorlar gibi enerjisi verildiğinde sürekli dönmezler. Sargılarına sırayla uygulanan gerilime göre belirli adımlarda dönerler. Unipolar ve Bipolar olmak üzere iki çeşitte bulunabilir.
Unipolar: Faz başına iki sargısı vardır. Genelikle her sarımın bir ortak ucu bulunur. Toplamda 6 veya 8 kablo ile bağlanır.
Bipolar: Faz başına bir sargısı vardır. Sürücü devresi olarak genellikle H köprüsü devresi kullanılır.

DRV8825 Step Motor Sürücü
Step motor bir mikrodenetleyiciye doğrudan bağlanamaz çünkü hiç bir mikodenetleyici çıkış portlarından bir step motoru döndürebilecek kadar akım veremez. Bu yüzden mikrodenetleyici ile step motor arasında bir sürücü mutlaka bulunmalıdır. Ben elimde bulunan DRV8825 step motor sürücüsünü kullandım. Bu tip step motor sürücüler birbirine benzemektedirler. Bir PWM sinyali ve dönme yönünü belirlemek için bir GPIO girişi ile kontrol edilebilirler.
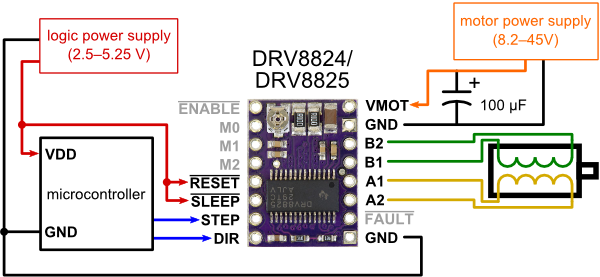
DRV8825 bağlantısı
Sürücü bağlantısı şekildeki gibi yapılabilir. STEP pininden uygulanan PWM sinyalinin her pals’inde step motor bir adım atar. DIR pini ise “direction” kısaltmasıdır. Bu pine uygulanan lojik değere göre motorun dönme yönü değişir. Örneğin; DIR=0 ise step motor sağa döner, DIR=1 ise step motor sola döner veya tam tersi de olabilir. M0,M1,M2 pinleri ise mikrostep çözünürlüğünü ayarlamak için kullanılır. Eğer bu pinler boş bırakılırsa full-step modda çalışır. Full-step modunda bir sürücüye bir pals verildiğinde motorun datasheet’inde verilen adım açısı(1,8°,7.5°,18° vb) kadar döner. Half-step modunda ise motoru bir adım döndürebilmek için 2 pals sinyal uygulanması gerekir. Aşağıda microstep çözünürlüğünü ayarlamak için gerekli tablo verilmiştir.

mikrostep çözünürlük tablosu
Sürücüye pals uygulanmadığı durumlarda motor kendini frenler ve dışarıdan bir etki ile döndürülemez. Bu durumda motor akım çekmeye devam eder. Eğer motorun dönmediği durumlarda akım çekmesini istemiyorsanız SLEEP veya RESET pinini bir GPIO pinine bağlayıp istediğiniz zamanlarda sürücüye lojik sıfır verip sürücüyü kapatabilirsiniz. (NOT: Bu pinler boşta bırakılırsa sürücü çalışmayacaktır. Bu yüzden GPIO ile kullanmayacaksanız yukarıdaki verilen bağlantıdaki gibi 3.3V a bağlayın.)Aynı şekilde Enable pini ile de sürücüyü kapatıp açabilirsiniz. FAULT pininden aşırı akım çekildiği durumlarda lojik çıkış verir isteğe bağlı kullanılabilir. Burada dikkat edilmesi geren bir nokta da step motorun uçlarının bulunmasıdır. Bipolar motor için ölçü aletinizi kısa devre moduna aldığınızda pinleri teker teker dolaştığınız zaman hangi pinler arasında ölçü aletinin buzzerı ötüyor ise o iki pin tek bir sargıya aittir(A1,A2). Bu uçları bulduktan sonra diğer kalan iki uç B1,B2 uçları olacaktır haliyle. Sürücü bağlantısını yapıp kodları yükledikten sonra motorda hala bir titreme varsa A veya B uçlarından herhangi birisini kendi aralarında değiştirin( A2 ile A1’in yerini veya B1 ile B2 ‘nin yerini değiştirebilirsiniz).
CubeMx Ayarlamaları
Sürücünün sadece “step” ve “dir” pinlerini STM32’ye bağladığım için CubeMx te ona göre ayarlamalar yaptım. Aşağıda da görüldüğü gibi bu pinlerden biri “Timer1” in birinci kanalından alınan PWM sinyali ve step motora yön verebilmemiz için gerekli olan dijital çıkış pini “DIR” pinidir.

Sırada PWM frekansı için gerekli Clock ayarları var. STM32f103’te “Timer1″in clock frekansı “APB1” kaynağından beslenir. Aşağıda Clock ayarları görülmektedir. Burada “APB1” frekansı 56Mhz olarak seçilmiştir.

Bu 56Mhz değeri PWM frekansı hesaplamak için kullanacağız.İstenilen PWM frekansına göre bazı registerların ayarlanması gerekir. Öncelikle deneme yanılmalara göre elimdeki motorun 1khz civarındaki frekanslarda sağlıklı çalıştığını gözlemledim. Bu yüzden PWM frekansının 1kHz olması için aşağıdaki formüle göre bir hesaplama yapacağız.

Bu formülde ARR(Auto Reload Register) değişkeni bizim PWM çözünürlük değerimiz. Bu değer istenildiği gibi ayarlanabilir. Ben 255 olarak ayarladım. Burada ARR değeri aslında bizim duty cycle değerimizi ifade ediyor. Yani duty cycle değeri 255 olduğu zaman PWM çıkışından 3.3V gerilim değeri okuruz.
Yukarıdaki formülde ARR registerı (255), Timer clock frekansı(56Mhz) ve istenilen PWM frekansı(1Khz) belirli. Formülde tek bilinmeyen prescaler değeri. Bu değeri de formülden çekebiliriz. Değerleri yerine yazdığımızda prescaler değeri “217” bulunur ve bu hesaplamalara göre aşağıdaki TIM1 Configuration” ayarları yapılmalıdır.
NOT: Prescaler değeri gerçekte 217.75 gibi küsüratlı bir sayı çıkmaktadır. Fakat prescaler değeri 16 bitlik ve tam sayı olmalı bunun için prescaler değerini 217 veya 218 seçebilirsiniz. Aradaki 1 fark frekansta az da olsa bir farklılık oluşturacaktır. Fakat bu fark gözardı edilebilir bir değerdir.

Timer Ayarları
Yukarıdaki resimdeki “Pulse” değerine dikkat çekmek isterim. Bu değeri kod içerisinde değiştirerek PWM sinyalinin duty cycle’ında oynama yapabiliyoruz. Bu uygulamada step motor süreceğimiz için PWM duty cycle değerinin %50 oranına karşılık gelen değeri 128 olarak ayarlanması daha iyi olacaktır. Bu yüzden ister CubeMX üzerinden isterseniz Keil üzerinden kodlar yardımıyla duty cycle değerini 128 değerine ayarlayabilirsiniz.
1 | __HAL_TIM_SET_COMPARE(&htim1,TIM_CHANNEL_1, 128); // Duty cycle %50 olarak ayarlandi. |
Ayrıca step motorun kaç adım döndüğünü sayabilmemiz için “NVIC Settings” sekmesinden “Timer1 update interrupt” kutucuğunu işaretlememiz gerekecek. Buradaki amaç her PWM palsinde bir kesme oluşturmak ve bu kesme sayesinde step motora kaç pals sinyal verileceğinin belirlenmesidir.
Kesme Alt Fonksiyonu
1 2 3 4 5 6 7 8 9 10 11 12 13 14 | void HAL_TIM_PWM_PulseFinishedCallback(TIM_HandleTypeDef *htim) { if(htim->Instance == TIM1) // eger kesme kaynagi timer1 den gelmis ise { sayac++; // her kesmede sayaci arttir. if(sayac == step) // eger sayac istenilen adim sayisi kadar artmis ise { HAL_TIM_PWM_Stop_IT(&htim1,TIM_CHANNEL_1); // PWM'i durdur. sayac=0; // bir sonraki komutta sayac sifirdan baslamali durum=0; // step fonksiyonunun içindeki while döngüsünden çikilmasi için // durum degiskeni sifirlandi. } } } |
Kesme fonksiyonu olarak “Pulse Finished Callback” fonksiyonunu kullandım. Program her bir palste bu fonksiyona dallanacaktır. Başka bir deyişle step motorun her bir adımında bu fonksiyon çalışacaktır. Böylelikle step motorun istenilen açıda veya adımda döndürülmesi sağlanabilir.
Step Fonksiyonu
Step motor kontrolü için basit bir fonksiyon yazalım. Bu fonksiyon iki parametre alsın bunlar döndürülmek istenen adım sayısı ve yön bilgisi olsun.
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 | void Step(int adim ,int yon) // step motor fonksiyonu. iki adet parametre alicak. Pals ve yön parametreleri { step=adim; if(yon==0) HAL_GPIO_WritePin(GPIOA,DIR_Pin,GPIO_PIN_RESET); // eger yön bilgisi sifir ise DIR pini lojik 0 yapildi. else HAL_GPIO_WritePin(GPIOA,DIR_Pin,GPIO_PIN_SET); // sifirdan farkli bir deger ise DIR pini lojik 1 yapildi. durum=1; HAL_TIM_PWM_Start_IT(&htim1,TIM_CHANNEL_1); // PWM'i baslatildi. while(1) // step motorun istenilen konuma gitmesi için belli bir süre gececek { // bu süre boyunca programin tekrar step fonksiyonunun içine girmesini önlemek için sonsuz döngü olusturuldu. if(durum==0) // step motor istenilen konuma gittiginde durum degiskeni sifir olacak ve döngüden çikilacak. break; HAL_Delay(1); } } |
Fonksiyonun ilk satırında “step” değişkenine fonksiyonun parametresi olan “adim” değişkeni atanmıştır. “Step” değişkeni daha sonra kesme fonksiyonun içerisinde “sayac” değeri ile karşılaştırılmaktadır. Her kesmede oluştuğunda yani step motorun her bir adımında “sayac” değişkeni artmaktadır. Kesme fonksiyonunun içerisinde bu iki değer “if” ile sürekli kontrol edilmektedir. Bu iki değer birbirine eşit olduğunda “durum” değişkeni sıfır değerini almaktadır.
Step fonksiyonunun diğer parametresi olan “yon” değişkenine göre step motorun döneceği yön belirlenmektedir. Bu işlem sürücünün “DIR” pinine lojik 1 veya 0 verilerek yapılmaktadır.
PWM’i başlatmak için veya durdurmak için HAL kütüphanesinin aşağıdaki iki kodunu kullanacağız.
1 | HAL_TIM_PWM_Start_IT(&htim1,TIM_CHANNEL_1); // PWM'i baslatildi. |
1 | HAL_TIM_PWM_Stop_IT(&htim1,TIM_CHANNEL_1); // PWM durduruldu. |
Program bu satırlara geldiğinde PWM’i durdurur veya başlatır.
Step fonksiyonunun kullanımı aşağıdaki gibidir.
1 2 3 4 5 6 7 8 9 10 11 | while (1) { Step(200,0); // 200 adım sağa dön HAL_Delay(1000); Step(400,1); // 400 adım sola dön HAL_Delay(1000); /* USER CODE END WHILE */ /* USER CODE BEGIN 3 */ } |
Kullandığım step motorun adım açısı 1.8 derecedir. 360/1.8 =200 olduğu için step motor 200 adım attığında 1 tam tur dönmüş olacaktır. Main fonksiyonun içerisinde step motor 1 tur sağa ve 2 tur sola döndürülmüştür.
Kodların tamamı aşağıdaki gibidir. Proje dosyalarına Github üzerinden ulaşmak için buraya tıklayabilirsiniz.
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 136 137 138 139 140 141 142 143 144 145 146 147 148 149 150 151 152 153 154 155 156 157 158 159 160 161 162 163 164 165 166 167 168 169 170 171 172 173 174 175 176 177 178 179 180 181 182 183 184 185 186 187 188 189 190 191 192 193 194 195 196 197 198 199 200 201 202 203 204 205 206 207 208 209 210 211 212 213 214 215 216 217 218 219 220 221 222 223 224 225 226 227 228 229 230 231 232 233 234 235 236 237 238 239 240 241 242 243 244 245 246 247 248 249 250 251 252 253 254 255 256 257 258 259 260 261 262 263 264 265 266 267 268 269 270 271 272 273 274 275 276 277 278 279 280 281 282 283 284 285 286 287 288 289 290 291 292 293 294 295 296 297 298 299 300 301 302 303 304 305 306 307 308 309 310 311 312 313 314 315 316 317 318 319 320 321 322 323 324 325 326 327 328 329 330 331 332 333 334 335 336 337 338 | /** ****************************************************************************** * File Name : main.c * Description : Main program body ****************************************************************************** ** This notice applies to any and all portions of this file * that are not between comment pairs USER CODE BEGIN and * USER CODE END. Other portions of this file, whether * inserted by the user or by software development tools * are owned by their respective copyright owners. * * COPYRIGHT(c) 2019 STMicroelectronics * * Redistribution and use in source and binary forms, with or without modification, * are permitted provided that the following conditions are met: * 1. Redistributions of source code must retain the above copyright notice, * this list of conditions and the following disclaimer. * 2. Redistributions in binary form must reproduce the above copyright notice, * this list of conditions and the following disclaimer in the documentation * and/or other materials provided with the distribution. * 3. Neither the name of STMicroelectronics nor the names of its contributors * may be used to endorse or promote products derived from this software * without specific prior written permission. * * THIS SOFTWARE IS PROVIDED BY THE COPYRIGHT HOLDERS AND CONTRIBUTORS "AS IS" * AND ANY EXPRESS OR IMPLIED WARRANTIES, INCLUDING, BUT NOT LIMITED TO, THE * IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS FOR A PARTICULAR PURPOSE ARE * DISCLAIMED. IN NO EVENT SHALL THE COPYRIGHT HOLDER OR CONTRIBUTORS BE LIABLE * FOR ANY DIRECT, INDIRECT, INCIDENTAL, SPECIAL, EXEMPLARY, OR CONSEQUENTIAL * DAMAGES (INCLUDING, BUT NOT LIMITED TO, PROCUREMENT OF SUBSTITUTE GOODS OR * SERVICES; LOSS OF USE, DATA, OR PROFITS; OR BUSINESS INTERRUPTION) HOWEVER * CAUSED AND ON ANY THEORY OF LIABILITY, WHETHER IN CONTRACT, STRICT LIABILITY, * OR TORT (INCLUDING NEGLIGENCE OR OTHERWISE) ARISING IN ANY WAY OUT OF THE USE * OF THIS SOFTWARE, EVEN IF ADVISED OF THE POSSIBILITY OF SUCH DAMAGE. * ****************************************************************************** */ /* Includes ------------------------------------------------------------------*/ #include "main.h" #include "stm32f1xx_hal.h" /* USER CODE BEGIN Includes */ /* USER CODE END Includes */ /* Private variables ---------------------------------------------------------*/ TIM_HandleTypeDef htim1; /* USER CODE BEGIN PV */ /* Private variables ---------------------------------------------------------*/ int step=0,durum=0,sayac=0; /* USER CODE END PV */ /* Private function prototypes -----------------------------------------------*/ void SystemClock_Config(void); static void MX_GPIO_Init(void); static void MX_TIM1_Init(void); void HAL_TIM_MspPostInit(TIM_HandleTypeDef *htim); /* USER CODE BEGIN PFP */ /* Private function prototypes -----------------------------------------------*/ void HAL_TIM_PWM_PulseFinishedCallback(TIM_HandleTypeDef *htim) { if(htim->Instance == TIM1) // eger kesme kaynagi timer1 den gelmis ise { sayac++; // her kesmede sayaci arttir. if(sayac == step) // eger sayac istenilen adim sayisi kadar artmis ise { HAL_TIM_PWM_Stop_IT(&htim1,TIM_CHANNEL_1); // PWM'i durdur. sayac=0; // bir sonraki komutta sayac sifirdan baslamali durum=0; // step fonksiyonunun içindeki while döngüsünden çikilmasi için // durum degiskeni sifirlandi. } } } void Step(int adim ,int yon) // step motor fonksiyonu. iki adet parametre alicak. Pals ve yön parametreleri { step=adim; if(yon==0) HAL_GPIO_WritePin(GPIOA,DIR_Pin,GPIO_PIN_RESET); // eger yön bilgisi sifir ise DIR pini lojik 0 yapildi. else HAL_GPIO_WritePin(GPIOA,DIR_Pin,GPIO_PIN_SET); // sifirdan farkli bir deger ise DIR pini lojik 1 yapildi. durum=1; HAL_TIM_PWM_Start_IT(&htim1,TIM_CHANNEL_1); // PWM'i baslatildi. while(1) // step motorun istenilen konuma gitmesi için belli bir süre gececek { // bu süre boyunca programin tekrar step fonksiyonunun içine girmesini önlemek için sonsuz döngü olusturuldu. if(durum==0) // step motor istenilen konuma gittiginde durum degiskeni sifir olacak ve döngüden çikilacak. break; HAL_Delay(1); } } /* USER CODE END PFP */ /* USER CODE BEGIN 0 */ /* USER CODE END 0 */ int main(void) { /* USER CODE BEGIN 1 */ /* USER CODE END 1 */ /* MCU Configuration----------------------------------------------------------*/ /* Reset of all peripherals, Initializes the Flash interface and the Systick. */ HAL_Init(); /* USER CODE BEGIN Init */ /* USER CODE END Init */ /* Configure the system clock */ SystemClock_Config(); /* USER CODE BEGIN SysInit */ /* USER CODE END SysInit */ /* Initialize all configured peripherals */ MX_GPIO_Init(); MX_TIM1_Init(); /* USER CODE BEGIN 2 */ __HAL_TIM_SET_COMPARE(&htim1,TIM_CHANNEL_1, 128); // Duty cycle %50 olarak ayarlandi. HAL_Delay(100); /* USER CODE END 2 */ /* Infinite loop */ /* USER CODE BEGIN WHILE */ while (1) { Step(200,0); HAL_Delay(1000); Step(400,1); HAL_Delay(1000); /* USER CODE END WHILE */ /* USER CODE BEGIN 3 */ } /* USER CODE END 3 */ } /** System Clock Configuration */ void SystemClock_Config(void) { RCC_OscInitTypeDef RCC_OscInitStruct; RCC_ClkInitTypeDef RCC_ClkInitStruct; /**Initializes the CPU, AHB and APB busses clocks */ RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSE; RCC_OscInitStruct.HSEState = RCC_HSE_ON; RCC_OscInitStruct.HSEPredivValue = RCC_HSE_PREDIV_DIV1; RCC_OscInitStruct.HSIState = RCC_HSI_ON; RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON; RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSE; RCC_OscInitStruct.PLL.PLLMUL = RCC_PLL_MUL7; if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK) { _Error_Handler(__FILE__, __LINE__); } /**Initializes the CPU, AHB and APB busses clocks */ RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK |RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2; RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK; RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1; RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV2; RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV1; if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_2) != HAL_OK) { _Error_Handler(__FILE__, __LINE__); } /**Configure the Systick interrupt time */ HAL_SYSTICK_Config(HAL_RCC_GetHCLKFreq()/1000); /**Configure the Systick */ HAL_SYSTICK_CLKSourceConfig(SYSTICK_CLKSOURCE_HCLK); /* SysTick_IRQn interrupt configuration */ HAL_NVIC_SetPriority(SysTick_IRQn, 0, 0); } /* TIM1 init function */ static void MX_TIM1_Init(void) { TIM_ClockConfigTypeDef sClockSourceConfig; TIM_MasterConfigTypeDef sMasterConfig; TIM_OC_InitTypeDef sConfigOC; TIM_BreakDeadTimeConfigTypeDef sBreakDeadTimeConfig; htim1.Instance = TIM1; htim1.Init.Prescaler = 217; htim1.Init.CounterMode = TIM_COUNTERMODE_UP; htim1.Init.Period = 255; htim1.Init.ClockDivision = TIM_CLOCKDIVISION_DIV1; htim1.Init.RepetitionCounter = 0; htim1.Init.AutoReloadPreload = TIM_AUTORELOAD_PRELOAD_DISABLE; if (HAL_TIM_Base_Init(&htim1) != HAL_OK) { _Error_Handler(__FILE__, __LINE__); } sClockSourceConfig.ClockSource = TIM_CLOCKSOURCE_INTERNAL; if (HAL_TIM_ConfigClockSource(&htim1, &sClockSourceConfig) != HAL_OK) { _Error_Handler(__FILE__, __LINE__); } if (HAL_TIM_PWM_Init(&htim1) != HAL_OK) { _Error_Handler(__FILE__, __LINE__); } sMasterConfig.MasterOutputTrigger = TIM_TRGO_RESET; sMasterConfig.MasterSlaveMode = TIM_MASTERSLAVEMODE_DISABLE; if (HAL_TIMEx_MasterConfigSynchronization(&htim1, &sMasterConfig) != HAL_OK) { _Error_Handler(__FILE__, __LINE__); } sConfigOC.OCMode = TIM_OCMODE_PWM1; sConfigOC.Pulse = 0; sConfigOC.OCPolarity = TIM_OCPOLARITY_HIGH; sConfigOC.OCNPolarity = TIM_OCNPOLARITY_HIGH; sConfigOC.OCFastMode = TIM_OCFAST_DISABLE; sConfigOC.OCIdleState = TIM_OCIDLESTATE_RESET; sConfigOC.OCNIdleState = TIM_OCNIDLESTATE_RESET; if (HAL_TIM_PWM_ConfigChannel(&htim1, &sConfigOC, TIM_CHANNEL_1) != HAL_OK) { _Error_Handler(__FILE__, __LINE__); } sBreakDeadTimeConfig.OffStateRunMode = TIM_OSSR_DISABLE; sBreakDeadTimeConfig.OffStateIDLEMode = TIM_OSSI_DISABLE; sBreakDeadTimeConfig.LockLevel = TIM_LOCKLEVEL_OFF; sBreakDeadTimeConfig.DeadTime = 0; sBreakDeadTimeConfig.BreakState = TIM_BREAK_DISABLE; sBreakDeadTimeConfig.BreakPolarity = TIM_BREAKPOLARITY_HIGH; sBreakDeadTimeConfig.AutomaticOutput = TIM_AUTOMATICOUTPUT_DISABLE; if (HAL_TIMEx_ConfigBreakDeadTime(&htim1, &sBreakDeadTimeConfig) != HAL_OK) { _Error_Handler(__FILE__, __LINE__); } HAL_TIM_MspPostInit(&htim1); } /** Configure pins as * Analog * Input * Output * EVENT_OUT * EXTI */ static void MX_GPIO_Init(void) { GPIO_InitTypeDef GPIO_InitStruct; /* GPIO Ports Clock Enable */ __HAL_RCC_GPIOD_CLK_ENABLE(); __HAL_RCC_GPIOA_CLK_ENABLE(); /*Configure GPIO pin Output Level */ HAL_GPIO_WritePin(DIR_GPIO_Port, DIR_Pin, GPIO_PIN_RESET); /*Configure GPIO pin : DIR_Pin */ GPIO_InitStruct.Pin = DIR_Pin; GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP; GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW; HAL_GPIO_Init(DIR_GPIO_Port, &GPIO_InitStruct); } /* USER CODE BEGIN 4 */ /* USER CODE END 4 */ /** * @brief This function is executed in case of error occurrence. * @param None * @retval None */ void _Error_Handler(char * file, int line) { /* USER CODE BEGIN Error_Handler_Debug */ /* User can add his own implementation to report the HAL error return state */ while(1) { } /* USER CODE END Error_Handler_Debug */ } #ifdef USE_FULL_ASSERT /** * @brief Reports the name of the source file and the source line number * where the assert_param error has occurred. * @param file: pointer to the source file name * @param line: assert_param error line source number * @retval None */ void assert_failed(uint8_t* file, uint32_t line) { /* USER CODE BEGIN 6 */ /* User can add his own implementation to report the file name and line number, ex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) */ /* USER CODE END 6 */ } #endif /** * @} */ /** * @} */ /************************ (C) COPYRIGHT STMicroelectronics *****END OF FILE****/ |
teşekkürler! çok açıklayıcı ve faydalı olmuş. elinize sağlık…